
This page is dedicated to the case studies related to the manuscript Learning-based compositional parameter synthesis for event-recording automata by Étienne André and Shang-Wei Lin, published in the proceedings of FORTE’17 [ALin17].
The software environment is made of IMITATOR (developed by Étienne André), CV (the compositional verifier developed by Shang-Wei Lin), and a python script interfacing both tools.
The version of IMITATOR used to run the experiments is IMITATOR 2.9-alpha1 (branch master, build 2212, GitHub hash 75e2110).
The following link allows to download both CV and IMITATOR 2.9-alpha1 together with the interfacing Python script:
These binaries are standalone binaries for Linux systems 64 bits, and require no dependency, except Python of course. To generate graphics, the dot utility (from the graphviz) package is necessary.
The source code for both IMITATOR and the interfacing script are available on GitHub.
We tried to compare our approach to the tool mentioned in [ABBCR16]. It can be downloaded there.
Note that, at the time of writing (February 2017), the efsmt_coverts installation instructions were not completely accurate, and we had to contact Lăcrămioara Aştefănoaei, who very kindly helped us to install the tool. Please feel free to do the same if necessary.
We present in the following table a list of case studies computed using various algorithms using IMITATOR.
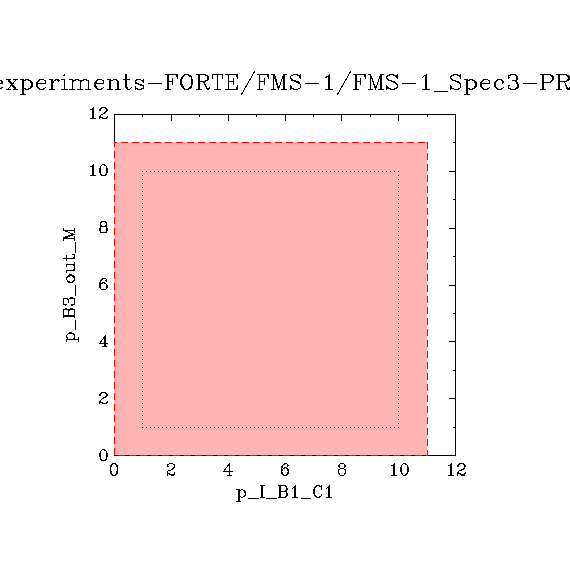
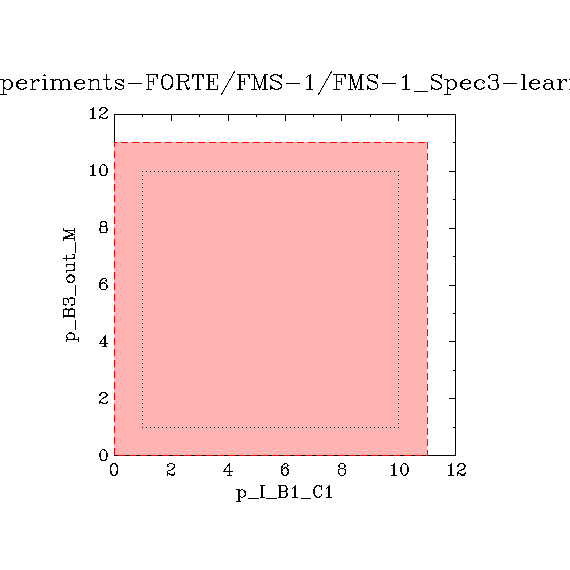
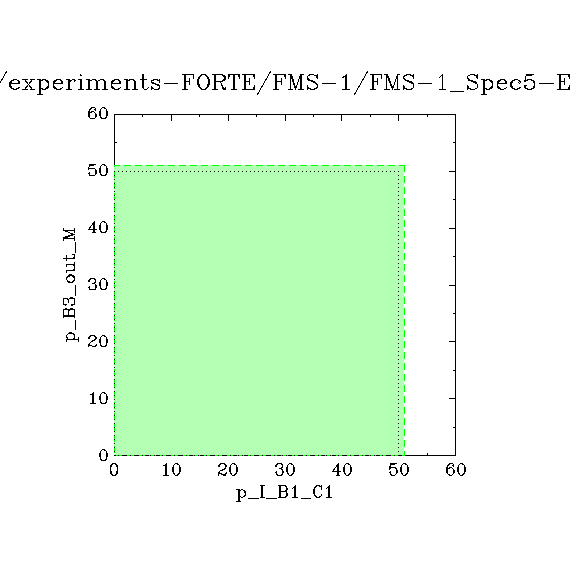
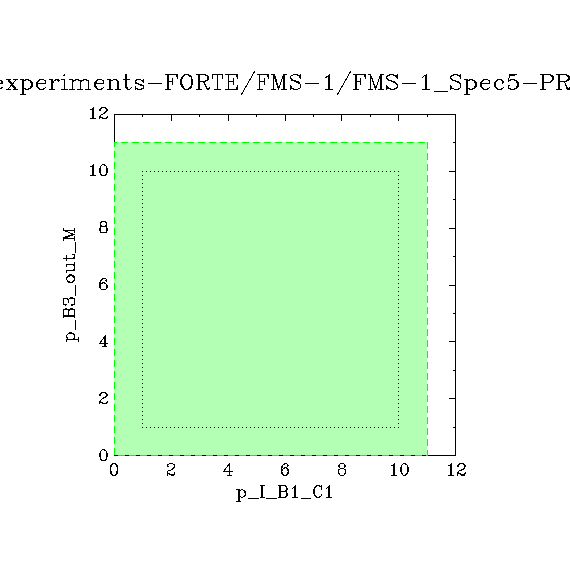
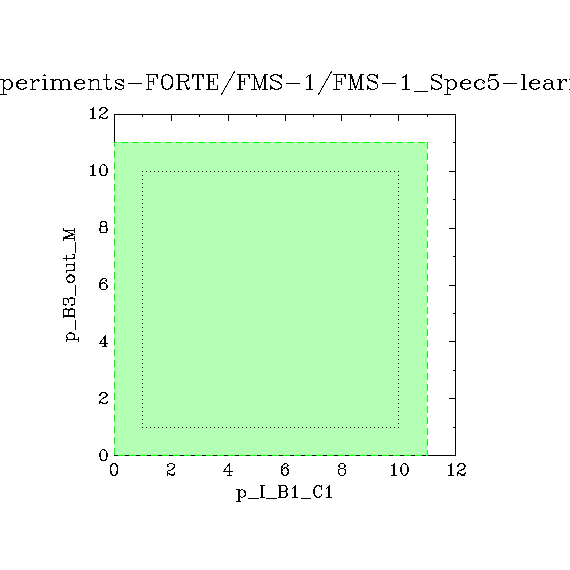
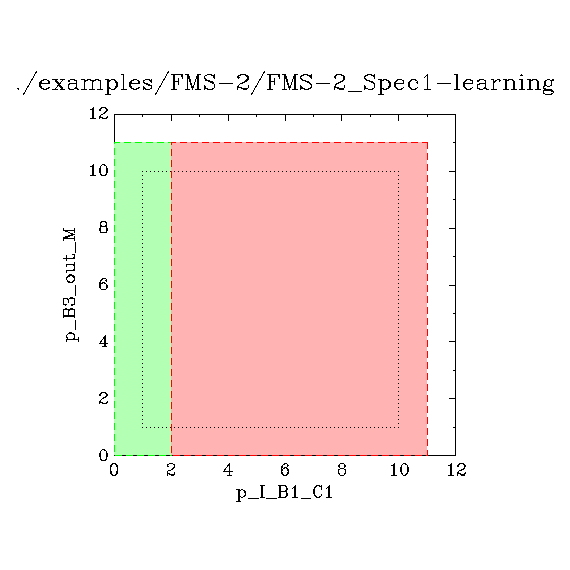
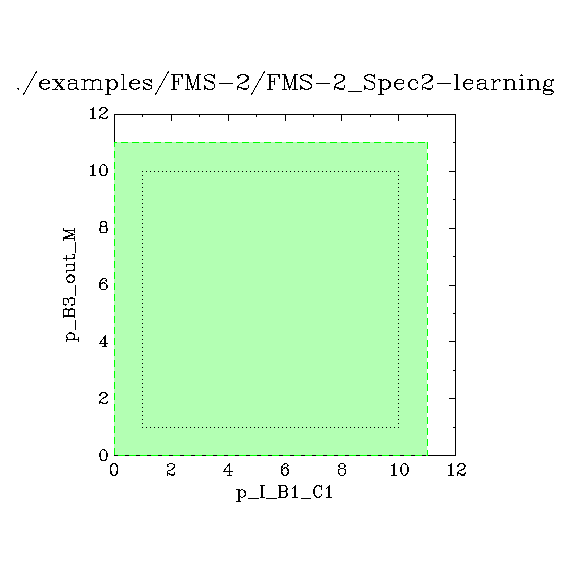
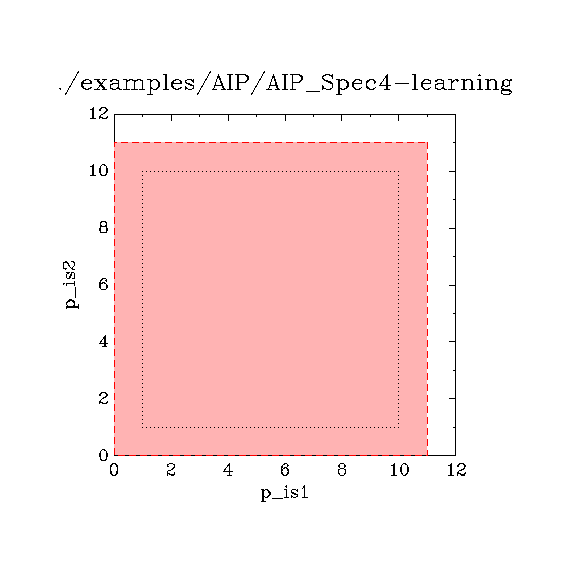
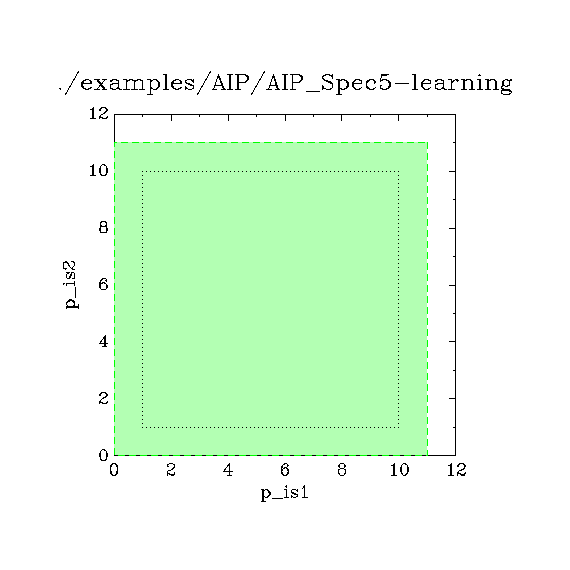
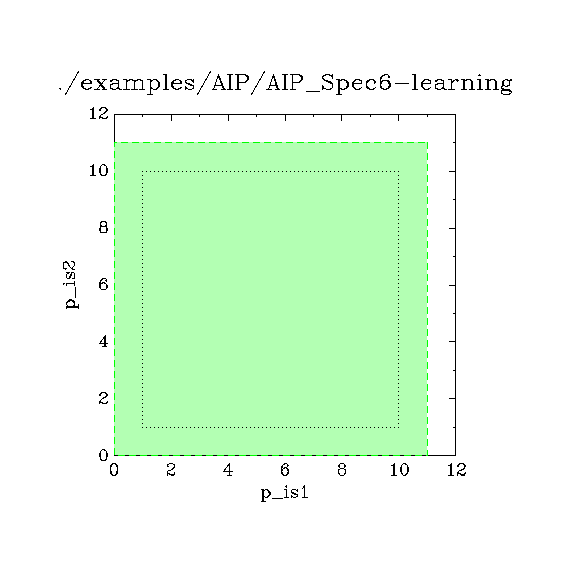
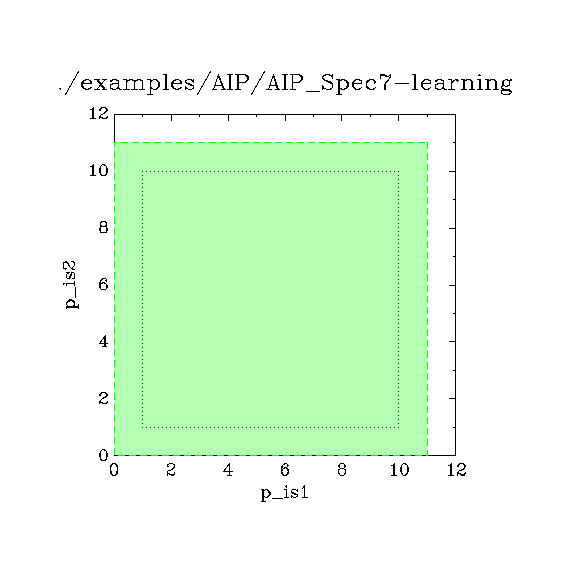
The model for each specification can be obtained by clicking on the specification name (for each specification, only the "Spec" PTA differs); the rectangular parameter domain can be obtained by clicking on the D0; logs including results can be obtained by clicking on the response time of each algorithm; the actual result by IMITATOR (in the IMITATOR normalized form) can be obtained by clicking on the "result", whenever the algorithm terminated; a graphical 2D representation of the synthesized constraint can be obtained by clicking on the [g] (when available).
| Benchmark | EFSynth | PRPC | CompSynth | [ABBCR16] | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Name | Ref | |A| | |X| | |P| | Spec | D0 | t (s) | Result | # iter | t (s) | Result | # abs. | # counter-ex | learning t (s) | total (s) | Result | models | interactions | log |
| FMS-1 | [LALSD14] | 6 | 18 | 2 | 1 | D0 | 0.299 | result [g] | 2 | 0.654 | result [g] | 1 | 1 | 0.074 | 0.136 | result [g] | models | FMS1.im | FMS1.log |
| 2 | 0.010 | result [g] | 1 | 0.372 | result [g] | 0 | 1 | 0.038 | 0.046 | result [g] | |||||||||
| 3 | 0.282 | result [g] | 1 | 0.309 | result [g] | 1 | 0 | 0.090 | 0.242 | result [g] | |||||||||
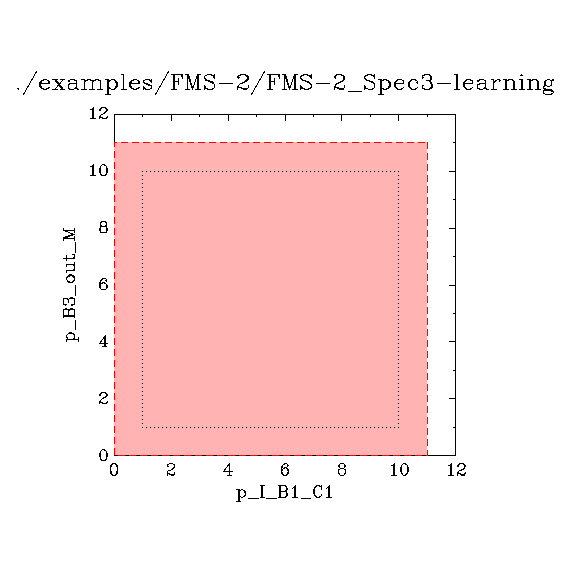
| FMS-2 | [LALSD14] | 11 | 37 | 2 | 1 | D0 | T.O. | T.O. | 1 | 1 | 84.2 | 88.9 | result [g] | models | FMS2.im | FMS2.log | |||
| 2 | T.O. | T.O. | 1 | 0 | 81.4 | 85.2 | result [g] | ||||||||||||
| 3 | 0.051 | result [g] | T.O. | 0 | 2 | 1.10 | 2.44 | result [g] | |||||||||||
| 4 | 0.062 | result [g] | T.O. | 0 | 1 | 1.42 | 1.53 | result [g] | |||||||||||
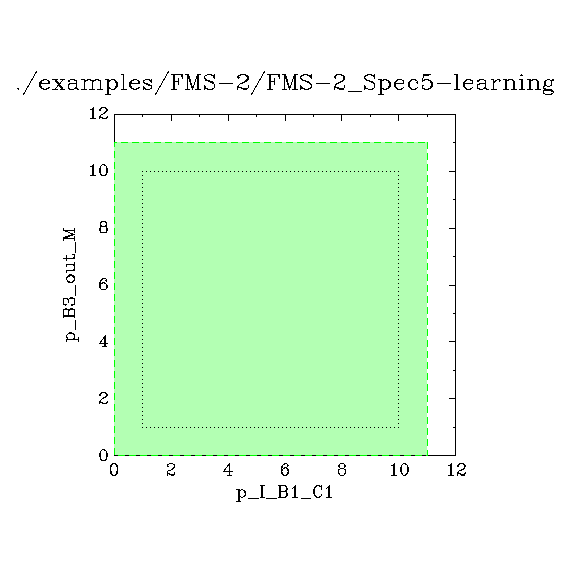
| 5 | T.O. | T.O. | 1 | 0 | 31.4 | 40.8 | result [g] | ||||||||||||
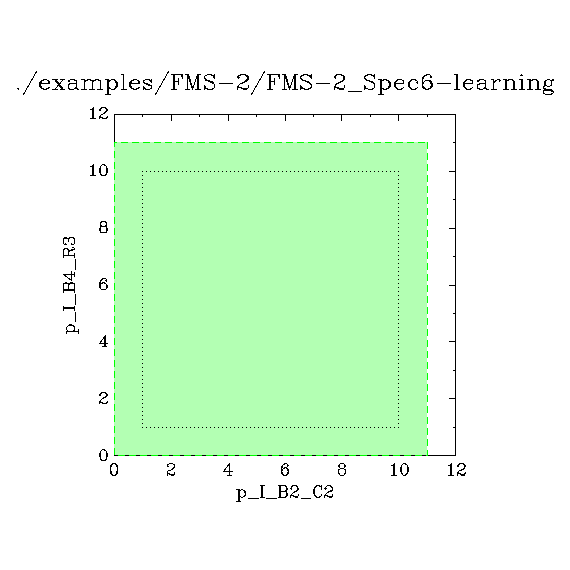
| 6 | D0 | T.O. | T.O. | 1 | 0 | 37.2 | 42.4 | result [g] | |||||||||||
| AIP | [LALSD14] | 11 | 46 | 2 | 1 | D0 | 0.551 | result [g] | T.O. | 0 | 1 | 0.086 | 0.114 | result [g] | (to upload) | (to upload) | (to upload) | ||
| 2 | 2.11 | result [g] | T.O. | 0 | 1 | 1.22 | 1.25 | result [g] | |||||||||||
| 3 | 3.91 | result [g] | T.O. | 0 | 1 | 8.50 | 8.54 | result [g] | |||||||||||
| 4 | 0.235 | result [g] | T.O. | 1 | 1 | 8.39 | 8.42 | result [g] | |||||||||||
| 5 | T.O. | T.O. | 1 | 0 | 0.394 | 0.871 | result [g] | ||||||||||||
| 6 | T.O. | T.O. | 1 | 0 | 5.32 | 9.58 | result [g] | ||||||||||||
| 7 | T.O. | T.O. | 1 | 0 | 1.76 | 3.19 | result [g] | ||||||||||||
| 8 | T.O. | T.O. | 1 | 0 | 1.13 | 4.35 | result [g] | ||||||||||||
| 9 | T.O. | T.O. | 1 | 1 | 0.762 | 1.84 | result [g] | ||||||||||||
| 10 | 0.022 | result [g] | T.O. | 0 | 1 | 0.072 | 0.094 | result [g] | |||||||||||
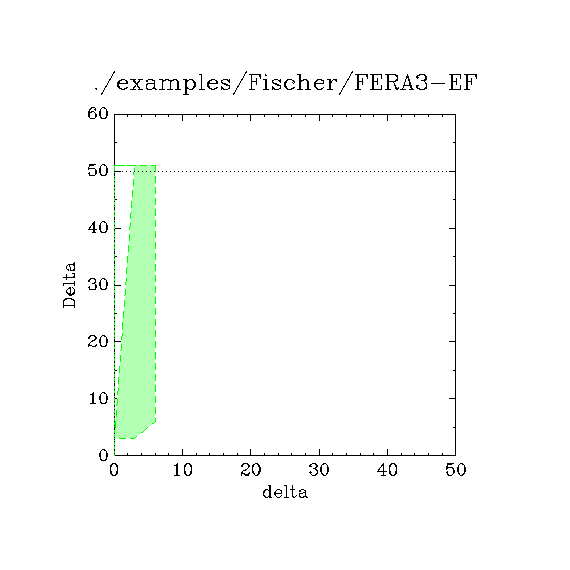
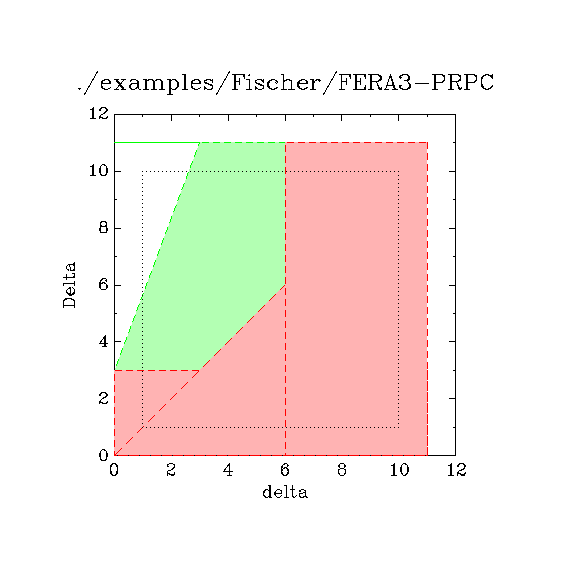
| Fischer-3 | 5 | 12 | 2 | Fischer-3 | D0 | 2.76 | result [g] | 4 | 14.0 | result [g] | T.O. | models | Fischer3.im | Fischer3.log | |||||
| Fischer-4 | 6 | 16 | 2 | Fischer-4 | D0 | T.O. | T.O. | T.O. | models | Fischer4.im | Fischer4.log | ||||||||
We present in the following table an evaluation of the scalability of CompSynth w.r.t. of the reference parameter domain using IMITATOR.
| Benchmark | CompSynth | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Name | Ref | |A| | |X| | |P| | Spec | D0 | # abs. | # counter-ex | find next point (s) | learning t (s) | total (s) |
| FMS-2 | [LALSD14] | 11 | 37 | 2 | 1 | 2,500 | 1 | 1 | 0.0 | 81.0 | 85.7 |
| 10,000 | 1 | 1 | 0.1 | 82.5 | 87.3 | ||||||
| 250,000 | 1 | 1 | 2.2 | 82.0 | 89.0 | ||||||
| 1,000,000 | 1 | 1 | 8.9 | 83.1 | 96.7 | ||||||
| 25,000,000 | 1 | 1 | 221.2 | 83.1 | 309.0 | ||||||
| 1,000,000,000 | 1 | 1 | 888.1 | 83.5 | 976.4 | ||||||
We present in the following table an evaluation of the partitioning heuristics of the models when running CompSynth.
| Benchmark | Partitioning | CompSynth | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Name | Ref | |A| | |X| | |P| | Spec | D0 | A | B | # abs. | # counter-ex | learning t (s) | total (s) | Result |
| FMS-1 | [LALSD14] | 6 | 18 | 2 | 1 | D0 | C M | R1 R2 A | 1 | 1 | 1.071 | 1.137 | result |
| C M R1 | R2 A | 1 | 1 | 0.077 | 0.148 | result | |||||||
| C M R2 | R1 A | 1 | 1 | 5.152 | 5.406 | result | |||||||
| C M A | R1 R2 | 1 | 1 | 5.663 | 5.980 | result | |||||||
| C M R1 R2 | A | 1 | 1 | 0.123 | 0.290 | result | |||||||
| C M R1 A | R2 | 1 | 1 | 0.119 | 0.360 | result | |||||||
| C M R2 A | R1 | 1 | 1 | 6.150 | 6.690 | result | |||||||
| 2 | C M | R1 R2 A | 0 | 1 | 0.133 | 0.149 | result | ||||||
| C M R1 | R2 A | 0 | 2 | 0.077 | 0.123 | result | |||||||
| C M R2 | R1 A | 0 | 1 | 0.040 | 0.056 | result | |||||||
| C M A | R1 R2 | 0 | 1 | 0.824 | 0.842 | result | |||||||
| C M R1 R2 | A | 0 | 1 | 0.034 | 0.044 | result | |||||||
| C M R1 A | R2 | 0 | 2 | 0.096 | 0.144 | result | |||||||
| C M R2 A | R1 | 0 | 2 | 0.042 | 0.051 | result | |||||||
| 3 | D0 | C M | R1 R2 A | 1 | 0 | 0.211 | 0.270 | result | |||||
| C M R1 | R2 A | 1 | 0 | 0.082 | 0.186 | result | |||||||
| C M R2 | R1 A | 1 | 0 | 1.094 | 1.208 | result | |||||||
| C M A | R1 R2 | 1 | 0 | 0.729 | 0.881 | result | |||||||
| C M R1 R2 | A | 1 | 0 | 0.119 | 0.279 | result | |||||||
| C M R1 A | R2 | 1 | 0 | 0.314 | 0.634 | result | |||||||
| C M R2 A | R1 | 1 | 0 | 0.104 | 0.257 | result | |||||||
This model is a parametric version of the flexible manufacturing system described in [LALSD14]. This flexible manufacturing system [QCM05] produces blocks with a cylindrical painted pin from raw blocks and raw pegs. It consists of 14 devices: three conveyors, two mills, a lathe, a painting device, six robots, and an assembly machine. The devices are connected through nine buffers, and the capacity of each buffer is one.
We modeled the FMS system in a constructive way such that FMS-1 is the simplest one and FMS-2 is a more detailed version. Properties require that each buffer should not overflow or underflow and that output of each buffer should be within three time units after its input.
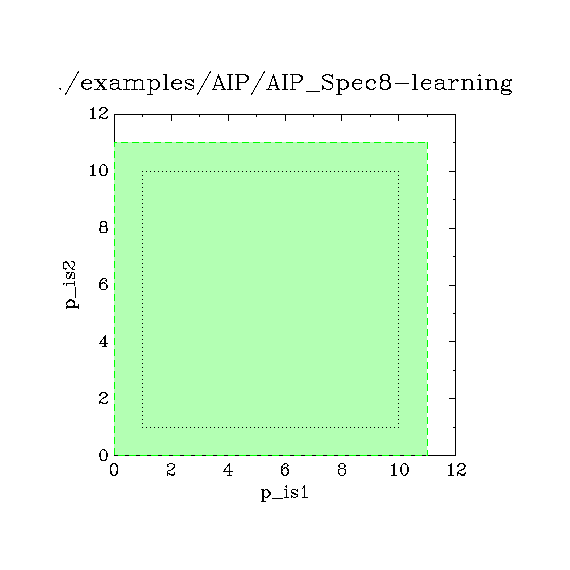
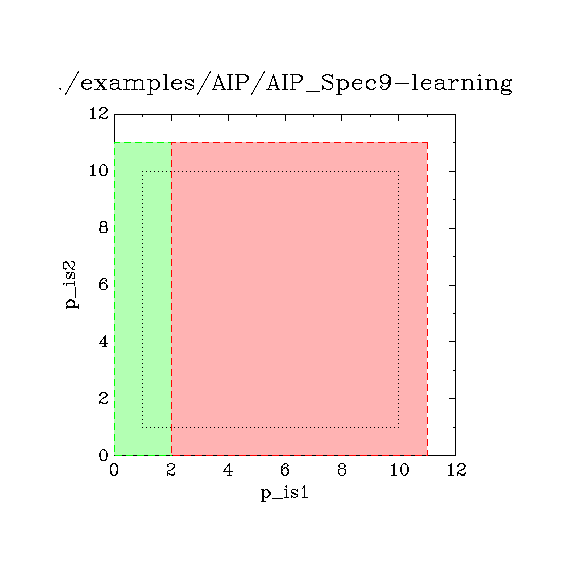
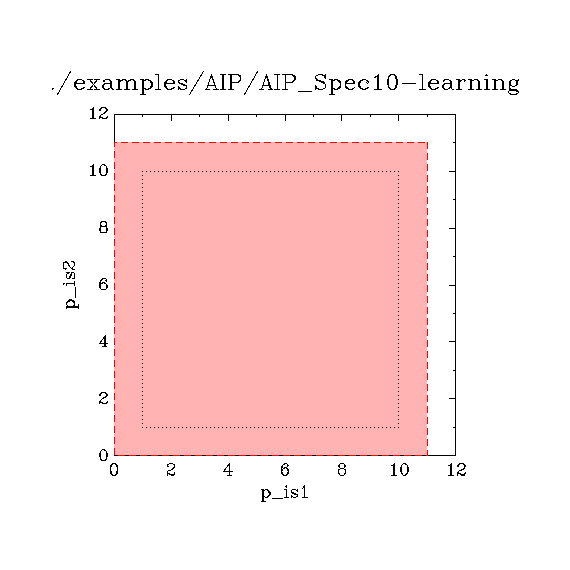
AIP is a parametric version of a manufacturing system producing two products from two different materials [LALSD14]; this version was itself derived from [LLD06].
The AIP manufacturing system produces two products from two different materials. It consists of ten components: an I/O station, three transport units, two assembly stations, three external loops, and a central loop. Properties require that the routes of the two materials should be opposite and output of each loop should be within three time units after its input.
This is a PERA model of Fischer’s mutual exclusion protocol, with 3 and 4 processes, respectively.
The (unique) specification requests than no more than one process is present in the critical section at one time.
For all case studies, the following commands were used:
> bin/imitator29alpha1 case_study.imi case_study.v0 -mode EF -merge -incl -output-result -time-limit 600
> bin/imitator29alpha1 case_study.imi case_study.v0 -mode PRPC -merge -incl -output-result -time-limit 600
> bin/imitator29alpha1 case_study.imi case_study.v0 -mode coverlearning -merge -incl -output-result -time-limit 600
To generate the synthesized constraint in a graphical form, please add:
-output-cart
When using IMIATOR + CV, the full syntax of IMITATOR is not supported. In addition, some "tags" must be used in IMITATOR models to be recognized by CV.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}